I’m having trouble launching my Spoofer instance in exact sync with the Main Skydel instance.
What I’m seeing
When I click Start on the Main instance, the Spoofer does start automatically, but 1–2 seconds later.
Switching both instances to Start Time → GPS Timing Receiver Time does not remove the delay.
I then tried Settings ▸ Global ▸ Synchronize Simulators
Main instance → Sync Time (Main instance)
Spoofer instance → Sync Time (Worker instance)
However, the Spoofer never connects to the Main (status: sync client is not running).
To confirm my setup, I created a regular Slave Skydel instance, and it connects to the Main with no problem.
My environment
Skydel version: 23.12.1
OS: Ubuntu 22.04.5 LTS
Licences: Multi-Instance and Spoofing both enabled
Hardware: two DTA-2115B cards (each instance uses its own output)
Help requested
How can I eliminate the 1–2 second start-up delay between the Main and the Spoofer instances?
Is there a special procedure to make the Spoofer act as a Worker (time-synchronised slave) of the Main?
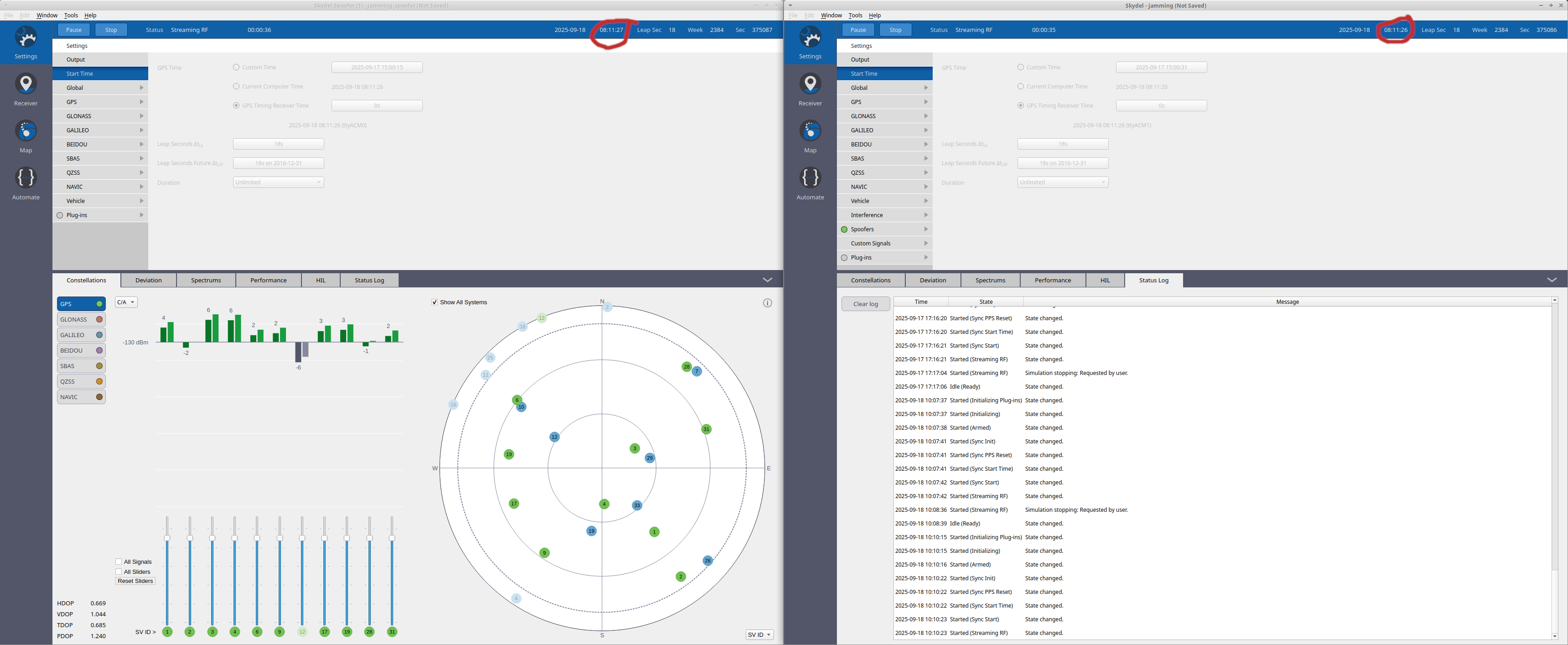
Screenshots illustrating the sync-time settings and the Spoofer’s “client not running” status are attached.
Why do you want to eliminate the delay? Did you notice any issue in the logs or in the RF output? The displayed time is a bit less accurate than the engine.
As shown by your screenshot, it’s expected that the Spoofer instance runs slightly ahead of the simulation to allow enough time to broadcast information to the Skydel instance.
When I perform my spoofing experiment, I consistently observe a 1-2 second delay in my Wireshark PTP messages. Since my experiments are time-critical, I need proper synchronization with the Skydel main instance as well as the Spoofer instance.
As you mentioned that ‘the spoofer runs slightly ahead of the simulation’, I tried changing the PPS IN Delay inside both the Skydel main instance and the Spoofer instance. For example: Main instance PPS IN Delay: 5000ms and Spoofer Instance PPS IN Delay: 3000ms. I have tried different values here and still found roughly around 1-2 seconds of delay.
As per the logs, when I run both instances at the same time with GPS Timing receiver Time, I am getting an error called ‘2025-09-18 14:21:07 Started (Streaming RF) Runtime Error in Dektec Streamer at millisecond 0 (radio millisecond 262) : Streaming Underflow’. And when I turn on my interference signal, I am getting 2 warnings in my status log, such as ‘2025-09-19 10:32:46 Started (Streaming RF) Overflow detected in RF Output RF Output #1. Percentage of ms with overflow = 11 %’ and ‘2025-09-19 10:32:46 Started (Streaming RF) Please, reduce the number of signals (interferences) or the power of RF Output RF Output #1’
So, the question is how to make both instances time synchronized? Why is the spoofer instance is not listening to the Sync Time (Main Instance) ?
Apart from this, I have tried upgrading the Skydel version to 24.12.1; unfortunately, I am still getting the same error. I cannot upgrade further since, as per my license, it is only upgradable upto 25.2.
Please let me know if any further clarifications are required.